
气动马达伺服控制系统工作原理
气动马达伺服控制系统工作原理,主要是由气压源、空气调理组、5口3位比例阀、快速排气阀、轮叶式气动马达、旋转光学编码器、伺服驱动器(内建HT46R24 MCU与转速转换电路)、个人计算机及相关运动控制卡(AD/DA卡)所构成。其系统架构图,如图二所示。
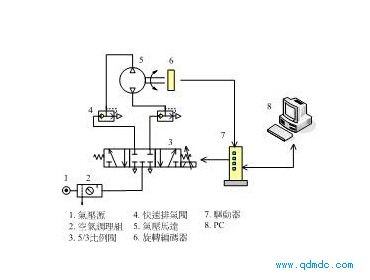
图二 气动马达精密伺服控制系统架构图
『气动马达伺服控制系统』工作原理详述如下:个人计算机为系统控制器与人机界面,使用者输入预设定之气动马达转速值,个人计算机计算相对应之控制量,再经由运动控制卡DAC转换成0~5V模拟电压讯号送至伺服驱动器,经伺服驱动器内运算放大电路送出0~10V电压至比例阀,比例阀依输入电压大小控制高压空气进入气动马达之流量与方向,使气动马达按照期望之转速与方向运转,最后经由光学编码器的量测送出方波讯号至伺服驱动器经由HT46R24 MCU计时/计数器计算出气动马达转速并转换为模拟电压讯号传输至PC,PC根据此回授转速值与内建控制法则(control law) ,调整输出模拟电压讯号进而达到气动马达转速闭回路控制,其气动马达转速闭回路控制方块图,如图三所示。
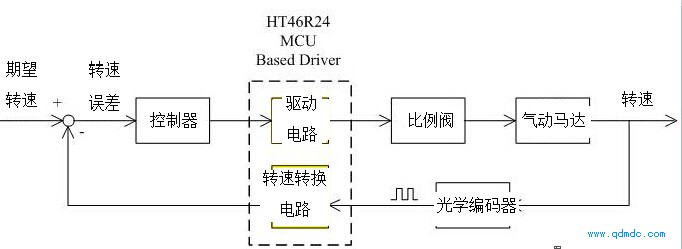
图三 气动马达转速闭回路控制方块图



