
气动马达在气动机器人关节的研制和应用
气压伺服控制技术是以气体为介质,实现能量传递、转换、分配和控制的一门技术。由于它具有介质来源简单、方便,不污染环境,元器件价格低廉,维修方便,系统安全可靠等特点,所以备受工业界的欢迎,在工厂自动化和机器人驱动系统中得到了广泛的应用。本文因此进行气动机器人开关阀式气动马达关节的研制。
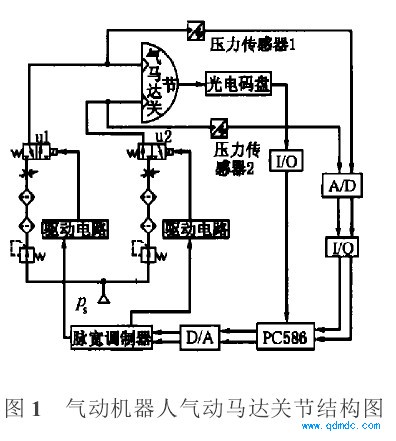
气动马达关节结构及工作原理(如图1、图2所示):气动机器人的关节的转动是由气动马达带动的,关节的转动角度由光电码盘检测,经PC机I/O口送入PC机内,气动马达的两腔压力经压力传感器、A/D、PC机I/O口送入PC机内。控制计算机发出指令转动角度信
号,与实际检测的转动角度信号进行比较,采用适当的控制算法后,发出输出控制信号,经输出驱动接口电路板控制电磁阀的开闭。若使气动马达向右转动,打开阀u1,关闭阀u2,使与u1相连的气腔与气源接通,另一气腔与大气接通,气动马达受计算机控制向右转动,反之向左转动。在计算机控制下气动马达接近目标点,由于系统有惯性、压力不均衡及气体泄露等原因,气动马达可能会有超调或小幅振荡、偏移。这时压力传感器会测量气动马达两腔压力,经计算机判断、运算后发出相应的PWM信号,控制气动马达保持在目标点上。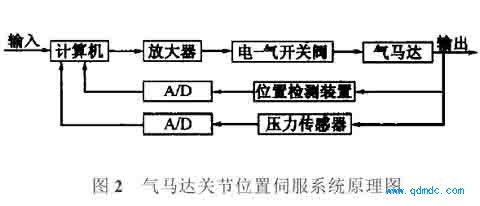
气动马达关节位置伺服系统的控制策略
脉宽调制(PWM)控制方式原理是用一定频率的脉冲控制开关阀的开和关,调节脉冲的占空比,以改变开关阀的开关时间,其宏观效果(时间平均)相当于改变阀的开口面积,使得开关阀在PWM信号控制时,其输出具有比例阀的特性。
气动马达位置伺服系统的控制器主要完成以下任务:
①根据给定的输出要求确定气动马达的输出转角及计算机控制PWM信号占空比,完成气动马达的粗定位;
②根据压力传感器的反馈信号克服和补偿气压系统在目标角度附近的振荡现象;
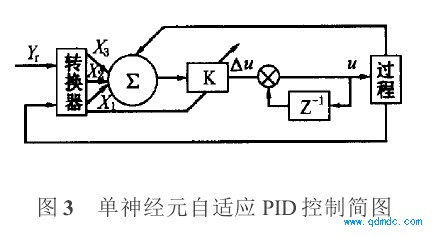
③根据位置检测装置的反馈信号对气动马达进行精确定位。根据以上任务设计了3个单神经元控制器,对气动马达关节进行位置伺服控制。单神经元自适应PID控制器简图如图3所示。
实验结果和结论
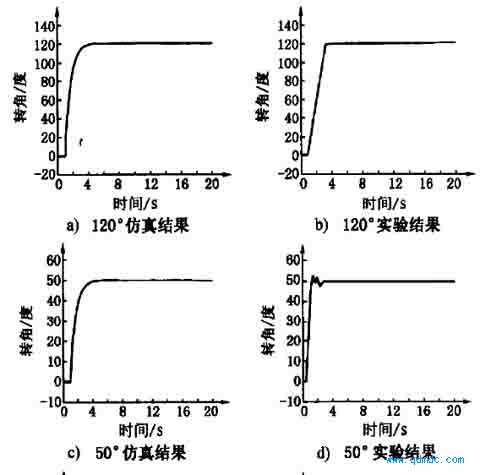
本实验中,所用气动马达的满行程为270°,采样周期为15 ms,图4给出了输入角度为120°、50°、10°时的仿真和实验结果。
本文主要是利用PWM控制技术,研制出气动机器人气动马达关节,通过实验得到如下结论:
(1)由于气体的固有特性和气动元件的性能,为减少气动马达关节在平衡位置附近的振荡,采用了压力反馈装置进行补偿。经实验可以看出效果显著;
(2)在实际控制过程中,因为气动马达两腔的体积较小,所以在气动马达进、排气腔的管道上应装有节流阀,以合理减小有效节流面积使系统可控性好;
(3)实验表明,采用自适应PID控制算法,对气动马达关节的位置控制精度的改善效果显著。
(陈 伟,张 剑)



