气动马达系统控制的探讨
长气管气动马达控制系统除了受时间延迟的影响外, 还受其它不确定因素的影响, 这些不确定因素基本上都是由于气体的可压缩性产生的, 因而对传统控制理论提出了挑战.智能控制的特点适合于长气管气动控制系统, 它的算法相对简单, 另外在知识的获取与表达方面可以尽量减少模型的不确定性, 还能够在控制算法上容忍和弥补模型的不确定性, 使系统具有学习、自组织和容错的功能.有关长气管气动马达模糊控制系统的研究证实.
按传统控制理论对长气管气动马达速度控制系统进行建模可以将其归纳为饱和非线性延迟系统.通过根轨迹和描述函数法可以分析时间延迟及饱和非线性环节对系统稳定性的影响,奈氏轨迹对系统的分析说明史密斯预估器的模型与实际模型在最大延迟参数不匹配时, 闭环系统不能保持稳定控制, 因此延迟对系统稳定性的影响是本系统稳定控制首先要处理的问题.
系统分析
在此将长气管气动马达速度控制系统作为整体对象进行分析, 在分析中将考察饱和非线性环节和延迟环节对系统的影响.
在阀控气动系统中, 一般阀的频宽比较大, 可达40 ~ 50 Hz 以上, 而其余的气动系统的频宽则在10 ~ 20 Hz , 甚至更低.一般情况下, 把阀看成惯性环节就足够了.另外, 当系统中最低的转折频率比传递函数分母各“ s”系数小得多时, 则可把阀看成一个简单的比例环节(保留其放大系数即可).
当管长L =20 m , τ=0 .05 s , 可得到系统的传递函数为
![]()
以下均以此系统模型作为对象, 并在采样间隔Tl =0 .01 s 条件下对离散化后的系统进行分析.
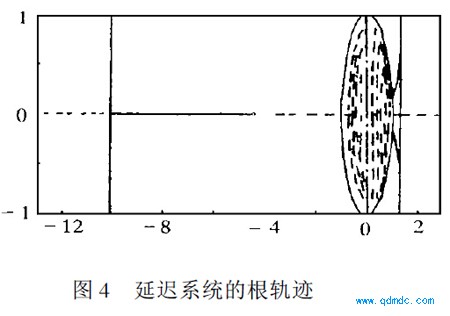
系统的根轨迹
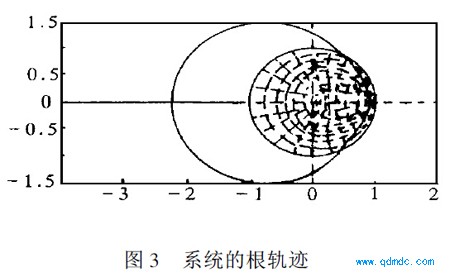
由于延迟的存在将改变系统的相频特性, 使系统的根轨迹大为复杂, 在这种条件下即使对系统采取串联和反馈校正, 也不会使系统能有多大改善, 即采用原来适用于无延迟系统分析与设计的根轨迹法不能设计出性能良好的延迟系统.图3 为系统的根轨迹, 图4 是加进小延迟后的根轨迹.结果表明:未加延迟时, 本系统的阻尼值已经偏小, 使根轨迹在单位圆内停留的时间较短;加上延迟后, 随着增益的增加, 系统的根轨迹很快超出单位圆, 表明系统失去稳定.